| Giving life to a hexapodic robot... |
|
I've allway wanted to build a robot. I'd like to build a walking robot. I've decided to build a hexapod since the six legs will give the robot good stability and a walking speed similar to a twolegged robot with a sability/balancing system. Here's a primitive sketch: 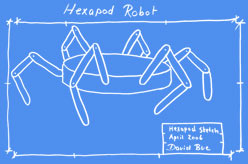 click to enlarge... The body of the robot will be circular. This gives the robot the ability to rotate around its rotational axis. Furthermore It'll be able to change walking direction dynamically as sketched below: 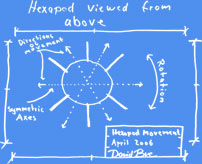
click to enlarge... Each leg will have 3 degrees of movement. This is obtained by using 3 R/C servos. With the robot having 6 legs this give a grand total of 18 R/C servos. I am current saving up to be able to buy these. They will cost me aroun 500 USD. Ouch!!!: 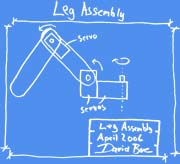 click to enlarge... The 18 R/C servos will be operated with a serial controllerboard. It's rather easy to build your own controllerboard using an ATMEL processor, but it's allmost just as cheap to buy a SERVIO controllerboard at www.picobotics.com  click to enlarge... I've created CAD drawings of the entire robot. Email me if you want a copy. Here's a picture of the half finished robot. The entire body is finished, and i only need to build all the legs. This will be done when I can afford the servos.  click to enlarge... You'd maybe prefer to using a PIC, ATMEL or similar processor as mainframe on your robot. I decided to use a Mini ITX mainmoard from Via. This little brilliant board has an onboard fanless processor and very low power consumption. I've fittet a 2.5" laptop HDD on the robot as well as WLAN. That way I'll end up with an autonomous robot with loads of computingpower. It will be remote controllable with the WLAN interface, and since the Via mainboard has video-out, it will be able to function as a mediacenter! Cool! I'll update this guide as the building process progresses. |